
UK developers says technology enables hand to respond automatically to certain objects.
Source: New bionic hand uses camera to ‘see,’ adjust grip | Healthcare IT News
Source: New bionic hand uses camera to ‘see,’ adjust grip | Healthcare IT News
A new wave of mobile AR and VR apps is here, and these are the ones you need to check out.
What happens when you create an open AI marketplace that can learn from itself?
Source: AI Is The Future Of Computing, And SingularityNET Is The Future Of AI
The company turned to a behavior-based security system that knows users by what they use and how they use it.
Source: Aetna replacing security passwords with machine learning tools | Healthcare IT News
The doc.ai app will use natural language processing to literally converse with patients via an app and explain their lab results to them.
Can a smartphone-enabled ultrasound machine become medicine’s next stethoscope?
Source: This doctor diagnosed his own cancer with an iPhone ultrasound
The Abstract: We describe a new learning procedure, back-propagation, for networks of neurone-like units. The procedure repeatedly adjusts the weights of the connections in the network so as to minimize a measure of the difference between the actual output vector of the net and the desired output vector. As a result of the weight adjustments, internal ‘hidden’ units which are not part of the input or output come to represent important features of the task domain, and the regularities in the task are captured by the interactions of these units. The ability to create useful new features distinguishes back-propagation from earlier, simpler methods such as the perceptron-convergence procedure1
https://www.nature.com/nature/journal/v323/n6088/pdf/323533a0.pdf
Handle is a research robot that stands 6.5 ft tall, travels at 9 mph and jumps 4 feet vertically. It uses electric power to operate both electric and hydraulic actuators, with a range of about 15 miles on one battery charge.
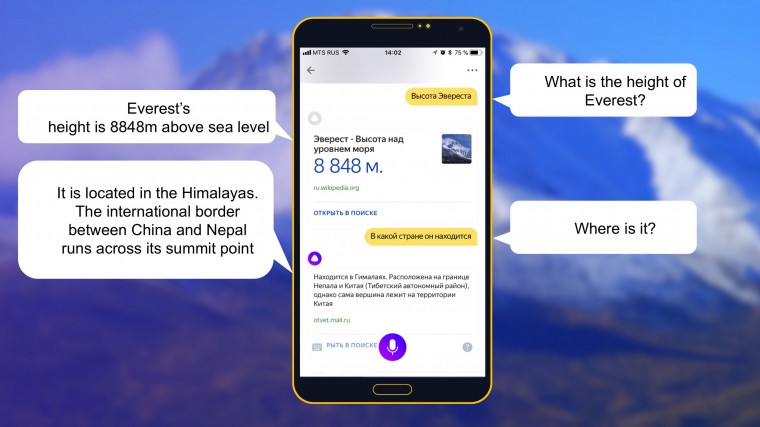 In Russia, There’s an AI Helper That Makes Fun of You—and It’s Wildly Popular The unfailingly polite tone of personal assistants like Siri and Alexa isn’t to everyone’s taste. Many in Russia, in fact, seem to prefer their AI helpers with sass and a dark sense of humor.
In Russia, There’s an AI Helper That Makes Fun of You—and It’s Wildly Popular The unfailingly polite tone of personal assistants like Siri and Alexa isn’t to everyone’s taste. Many in Russia, in fact, seem to prefer their AI helpers with sass and a dark sense of humor.